王敏, 廖松泉, 孙翊, 丁基恒, 蒲华燕, 罗均, 刘清宇
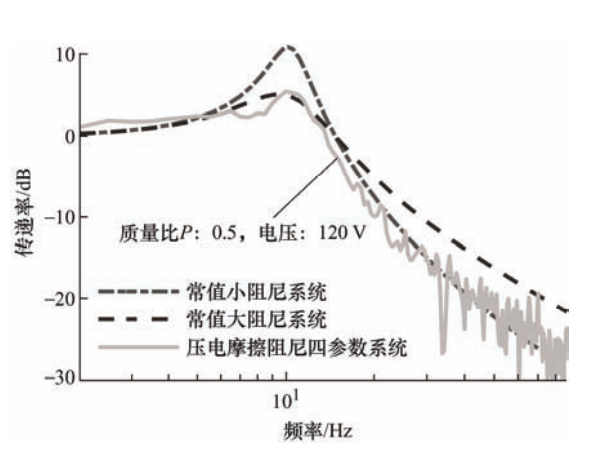
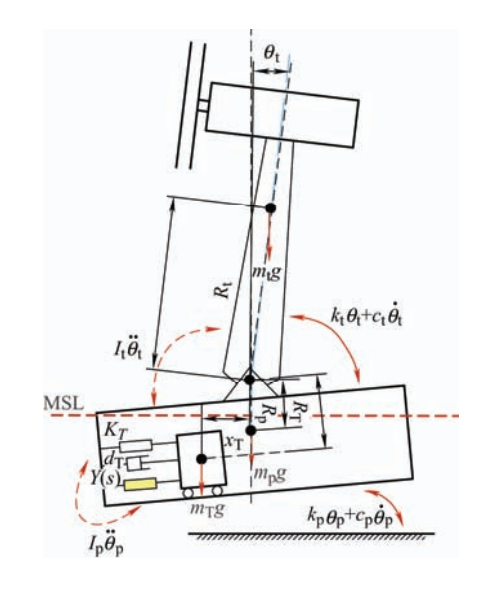
在轨卫星搭载的高精度有效载荷对环境微振动异常敏感,从而对隔振系统的振动衰减性能提出了更高的要求。传统两参数被动隔振系统提高隔振性能时,常采用添加定常阻尼进行能量耗散的方式,但存在低频共振峰抑制与高频快速衰减不能兼顾的固有矛盾问题。为了解决这一问题,一种能够实现阻尼特性基于频率变化的四参数隔振系统被提出,采用归一化方法建立其系统传递率与等效阻尼理论模型,并与两参数和三参数隔振系统进行对比分析。基于四参数系统的频变阻尼等效理论,设计一种基于压电陶瓷致动器产生摩擦阻尼的具象化四参数隔振系统,考虑非线性摩擦阻尼的融合问题,并分析中间等效质量参数对阻尼频变特性的影响规律,最后对其频变阻尼特性和隔振性能进行了仿真与实验验证。结果表明:时域上,四参数隔振系统对随机信号的隔振率达到91.1%;频域上,相较常值小阻尼系统,四参数隔振系统在低频共振处的峰值性能提升5.46 dB,且高频段保持相近的快速衰减,表现出低频大阻尼、高频小阻尼的频变阻尼特性。仿真与实验结果均表明,系统能够解决被动隔振系统中存在的高低频隔振性能之间的矛盾问题。