马召召, 周瑞平, 杨庆超, LEE Heow Pueh, 柴凯
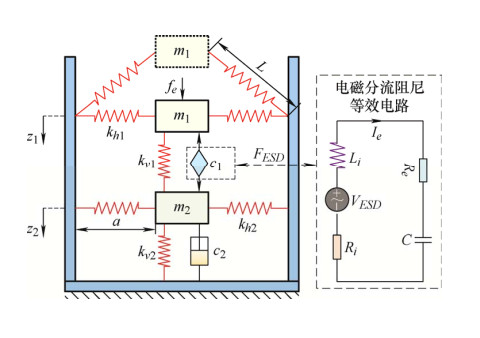
双层准零刚度隔振器(Two-stage quasi-zero-stiffness vibration isolator, TQZS VI)可以有效地抑制低频振动以及迅速衰减高频振动,电磁分流阻尼器(Electromagnetic shunt damping, ESD)也被证明是从振动结构收集能量的可行方式。通过集成TQZS VI和ESD,提出了一种能够实现振动控制和能量收集双功能的新型TQZS VI。所提出装置的准零刚度是通过垂直弹簧与两个并联的横向弹簧实现的,电磁分流阻尼作为上下层之间的黏性耗散元件,由连接到外部谐振电阻-电容-电感(Resistance-capacitance-inductance, RCI)串联电路的ESD提供。首先,建立了含电磁分流阻尼双层准零刚度隔振器(Two-stage quasi-zero-stiffness vibration isolator with electromagnetic shunt damping, ESD-TQZS VI)的力学模型和数学模型。然后,采用谐波平衡方法(Harmonic balance method, HBM)和弧长延拓方法求解了ESD-TQZS VI的幅频响应方程。从力传递率和输出功率的角度,分析了系统参数对振动隔离和能量收集性能的影响,发现大阻尼比有利于衰减谐振峰,同时对能量收集影响较小;大分流电阻不利于衰减谐振峰,而且会使得系统隔振频带变窄。最后,揭示了参数优化后ESD-TQZS VI的分岔及吸引子共存特性。结果表明,ESD-TQZS VI能够显著衰减低频振动的谐振峰值,同时实现振动能量收集。