王衍, 谢雪非, 徐慧, 黄周鑫, 何一鸣, 杨怀石, 胡琼
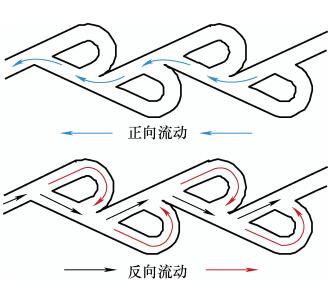
引入阻塞流体实施封严是非接触式密封的基本形式,节流效率低是制约此类技术性能提升、系统简化的关键。特斯拉阀凭借独特的造型结构,反向流动时形成的巧妙逐节冲击阻塞特性具有高效的节流效率。借鉴这一结构提出一种新型非接触式自冲击密封结构,兼具零磨损、高稳定性、结构简单和节流高效等特点,极具吸引力。应用CFD技术,仿真模拟不同结构和工况参数下新型密封的性能表现,结果表明:相比于水平型和阶梯型自冲击密封结构,层叠式结构具有更高的级数布置效率,并以AbBa式组合、交错比k=2时的抑漏效果最佳;新型密封对氢气、甲烷等低密度气体的泄漏偏高,对其他高密度气体的泄漏基本不变;新型密封泄漏量受压力影响较大、受转速影响较小,通过减小密封间距及增大密封级数可有效抑漏。相同工况下,以泄漏量为指标,新型密封较迷宫、螺旋、间隙密封可分别减漏27.79%、53.33%、64.34%;以密封间距为指标,新型密封实现标准泄漏时的密封间距是干气密封十几倍甚至几十倍,且新型密封间距为刚性间隙,稳定性更高。提出的新型密封结构,将衍生出一种密封新理论和原创技术,可以实现对现有非接触密封体系的理论拓展和技术革新。