侯佳奇, 张广明, 于志浩, 李印, 马令轩, 韩志峰, 石凯, 郭辰旭, 兰红波
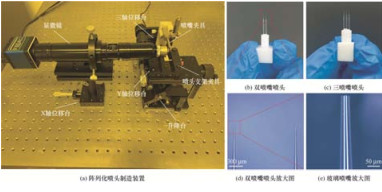
电流体动力喷射打印较低的效率已成为制约其从实验室走向广泛工业化应用的主要技术瓶颈之一,针对这一挑战性难题,提出一种平板电极电场驱动多喷头喷射高效微3D打印新工艺,论述了平板电极电场驱动多喷头喷射高效微3D打印的基本原理。搭建一种阵列化喷头制造装置,实现高精度阵列化喷头的快速制造;利用COMSOL仿真软件,分析了阵列化喷头的电场分布以及喷嘴间的高度差、内径差等对电场强度的影响;通过实验,揭示了主要工艺参数(施加电压、气压、打印速度)对于打印精度(线宽)和一致性的影响规律;最后,基于提出新方法并结合优化的工艺参数,分别使用单/双/三喷嘴喷头制造了面积80 mm×80 mm,周期500 μm,线宽20 μm的透明电极,分别耗时86.1 min、45.2 min、29.1 min,并对其光电性能进行测量和表征,网栅透光率(波长550 nm)分别为91.14%、91.07%、90.43%,相应的方阻分别为4.07 Ω/sp、3.85 Ω/sp、3.47 Ω/sp,在不牺牲光电性能的前提下,大幅提高了生产效率。研究结果显示,提出的平板电极电场驱动多喷头喷射微3D打印为大面积微结构高效低成本制造提供了一种具有工业应用前景的全新解决方案。