闫杨予, 胡锦龙, 韩启飞, 郭跃岭, 苏江舟, 何智, 王志敏, 刘长猛
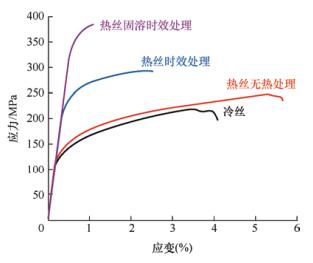
电弧增材制造技术可以缩短生产周期,降低成本,实现铝合金的快速成形,但存在结构内部含有较多气孔及晶粒粗大的问题。热丝辅助电弧增材制造(HWAAM)可以有效降低气孔率和细化晶粒,进一步提高电弧增材制造Al-Cu-Mg-Ag合金的性能。采用热丝电弧增材制造技术制备了Al-Cu-Mg-Ag耐热铝合金,利用拉伸试验、扫描电子显微镜(SEM)和透射电子显微镜(TEM)等实验方法,研究了电弧增材制造Al-Cu-Mg-Ag铝合金的气孔缺陷、显微组织和力学性能。结果表明,与冷丝成形合金相比,热丝辅助电弧增材制造Al-Cu-Mg-Ag合金气孔率降低25%,气孔球形度增加,空间分布较为均匀;同时晶粒尺寸降低30%,晶粒形貌趋于等轴晶化。冷丝结构件抗拉强度为218 MPa,屈服强度为134 MPa,延伸率为3.2%,使用热丝电弧增材制造后,力学性能提高,其抗拉强度提升至242 MPa,屈服强度提高至148 MPa,延伸率4.2%。最后,分别采用固溶+时效和人工时效热处理工艺,进一步改善了热丝辅助成形Al-Cu-Mg-Ag合金的力学性能。固溶与时效热处理后抗拉强度达到368 MPa,延伸率下降至0.5%,时效热处理后强度达到297 MPa,延伸率2.1%。