董晓彬, 周天丰, 贺裕鹏, 王添星, 刘朋, 赵斌, 赵文祥, 王西彬
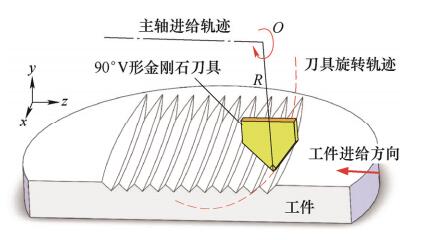
当微纳结构尺度与可见光波长尺度接近时,在白光照射下将产生特定的结构色,颜色鲜艳亮丽。结构色的色彩特性由微纳结构形状特征和周期尺度决定,其颜色鲜艳程度和亮度由微纳结构形状精度和表面质量决定。提出了一种微纳结构轴向进给飞切加工方法,通过在磷化镍(Ni-P)材料表面高效率高精度加工出微纳米尺度的"梭形沟槽",其单元特征尺寸为200~1 000 nm、表面粗糙度为7~10 nm,实现了结构色微纳结构单元和色彩特征调控;并通过加工轨迹规划和工艺参数调控,实现了结构色像素单元与单元之间的无缝拼接,最终形成大面积结构色图案的制造与调控。本技术将在结构色滤光、微纳仿生结构以及功能表面等方面中产生巨大的应用价值。