 PDF(2861 KB)
PDF(2861 KB)
 PDF(2861 KB)
PDF(2861 KB)
 PDF(2861 KB)
PDF(2861 KB)
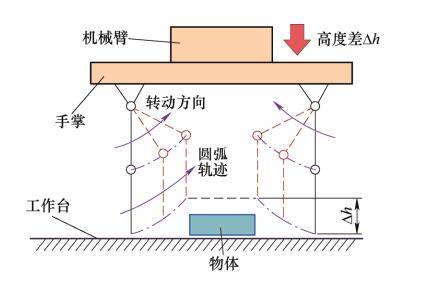
直线平夹自适应机器人手抓取分析与实验
Grasping Analysis and Experiment of a Linear-parallel and Self-adaptive Robot Hand
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






