王成勇, 陈志桦, 陈华伟, 宋清华, 任莹晖, 隋建波, 舒利明, 陈滨, 郑李娟
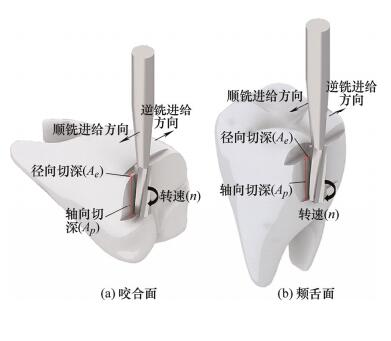
生物骨材料是一种结构复杂的各向异性材料,其切削加工是外科手术中一项基础而关键的操作。骨材料的加工质量直接影响手术治疗效果、人工假体植入稳定性、以及术后康复时间。人体不同部位的骨材料的力学性能存在一定差异,手术器械种类繁多且操作不同,使骨材料的加工方式呈现多样化。在外科手术中,各类器械需要对骨材料进行高精度、高效率、低损伤的加工,其加工机理研究对提高手术器械的使用性能,手术治疗效果和康复效果具有重大意义。因此,从生物骨材料的基础力学与断裂力学等特性出发,阐述了包括钻、铣、磨、锯等机械加工方式以及超声、激光、和水射流等特种能场加工方式对骨材料的切除机理,分析了不同机械加工方式下的切削力与切削温度理论模型,特种能场的切除机理与加工特性,指出骨材料加工的发展现状以及目前存在的一些问题,提出了骨材料加工的主要研究重点。