吴甲民, 杨源祺, 王操, 何逸宁, 石婷, 甘恬, 陈双, 史玉升, 王卫
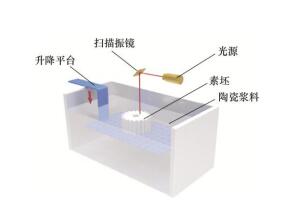
陶瓷材料因具有高硬度、高强度、耐高温、抗腐蚀等优异性能,被广泛应用于航空航天、生物医疗等领域,但是应用于上述领域的复杂结构陶瓷的制造仍然是一个重要的挑战。增材制造技术通过逐层堆积材料的方式来获得实体,在制造复杂结构陶瓷方面具有传统成形方式所无法比拟的优势。在众多陶瓷增材制造技术中,陶瓷光固化技术因其理想的成形质量而受到广泛关注和重视。在介绍立体光固化、数字光处理这两种主流陶瓷光固化技术的原理和特点的基础上,系统地介绍和分析了立体光固化技术和数字光处理技术的研究现状、应用以及存在的问题。最后,对陶瓷光固化技术及其应用进行了总结和展望。