田军, 姚松杰, 韩宝庆, 王龙杨, 张大兴, 周澄, 刘菁, 王志海, 于坤鹏, 王从思
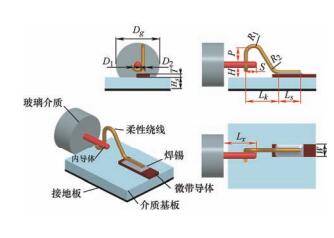
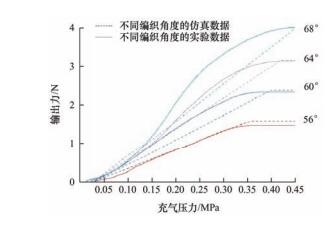
随着微波电路朝着高集成化、高频率、高可靠性方向发展,微波组件间的互联结构形态成为了显著影响微波电子系统性能的重要因素。针对微波模块互联结构表征不清,结构参数与传输性能关联机理不明,性能最优结构形态难以确定的问题,提出了一种面向微波组件电性能的柔性绕线互联最优构形参数确定方法,对柔性绕线互联构形进行参数化表征建模,基于影响度确定柔性绕线互联构形关键参数,试验设计确定柔性绕线互联局部最优构形参数,以试验局部最优构形参数为初值,基于粒子群算法确定面向信号传输性能的互联全局最优构形参数。算例结果表明,与初始构形参数下的回波损耗与插入损耗相比,全局最优构形参数下的回波损耗和插入损耗对应电性能分别提升了558.6%和97.8%,验证了该方法的准确性。研究结果对微波组件柔性绕线互联结构的优化设计与性能提高具有一定的指导意义和参考价值。