孟佳丽, 连芩, 李涤尘, 何晓宁, 刘小栋, 李华
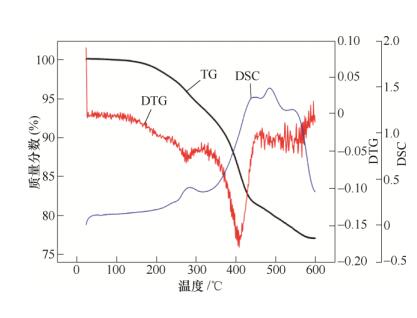
β″氧化铝陶瓷固体电解质管(Beta alumina solid electrolyte tube,BASE管)是高温热电转换器能量转换的关键部件。开展了薄壁BASE管的面光源光固化结构成型及其转相工艺研究:开发和制备了体积分数为45%的专用陶瓷浆料,通过浆料光固化性能和曝光参数的试验研究,确定了合适的面曝光成型打印参数;通过素坯的热重曲线分析,建立了脱脂和烧结工艺路线。通过EDS元素分析,烧结后样品仅有Al、O、Zr三种元素;烧结后样品致密度为95.3%,弯曲强度为(352.0 ±37.5) MPa。以Na2O为钠源开展的转相工艺研究,发现在1 100℃、1 200℃、1 300℃、1 400℃和1 500℃五个温度时转相均有β″-Al2O3的生成,且1 500℃时β″-Al2O3生成量为80.5%,其电导率为7.83×10-3 S/cm(450℃)。研究了转相对样品致密度、弯曲强度和尺寸精度的影响,发现转相会造成样品致密度的下降。研究表明了面曝光成型技术具有制造薄壁BASE管的可行性,为BASE元件和低成本快速制造Na+电池和碱金属热电转换器提供新的制造手段。