刘赵淼, 钟希祥, 杨刚, 逄燕, 任彦霖, 徐元迪, 高山山
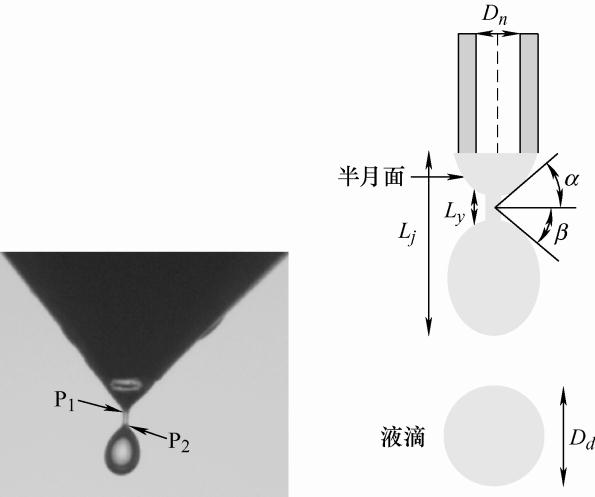
微滴喷射增材制造技术作为制造领域的新兴前沿技术有着广泛的应用前景,微滴生成特性对增材制造中微滴在基板铺展、搭接、凝固等过程影响较大,研究微滴生成特性对于提高液滴生成尺寸、频率和稳定性有重要意义。通过试验研究气动按需喷射作用下的微滴喷射行为,探究喷嘴尺寸、黏度和供给压力等因素对射流断裂过程及液滴生成稳定性的影响关系,并进一步研究形成角的变化对液桥断裂顺序及卫星液滴产生的影响关系。研究结果表明,随着喷嘴直径减少,韦伯数(We)显著减少,当喷嘴直径减少到100 μm时,We变为0.33,液滴尺寸与喷嘴直径的比值急剧增大;随着黏度的增加,射流颈缩段的液桥显著增长,液滴尺寸明显增大。在保证生成单个液滴的压力条件下,当供给压力较小时,液桥两端先后断裂形成卫星滴,并最终与半月面融合;随着压力的增大,液桥只发生一次断裂,剩余射流回缩到喷嘴内。在气动式喷射方式中由于上形成角始终大于下形成角,所以液桥总是在靠近液滴端首先断裂,该研究结果有助于提高气动式微滴喷射装置的液滴生成质量。