陶飞, 高鹏飞, 张辰源, 易航, 邹孝付, 王琰隆, 张建康, 张贺, 刘蔚然, 王凯旋, 杨春霞
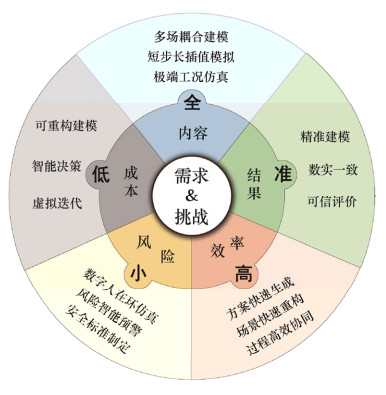
试验测试验证(ETV)是了解产品级、系统级、复杂巨系统级物理对象的基本属性和性能特征的一般性方法,ETV结果能为物理对象的论证规划、研发设计、生产制造、运维服役等全生命周期各阶段的相关决策提供重要参考,对于物理对象的迭代优化和性能管控具有重要意义。结合不同阶段产品和系统的典型特征与ETV需求,从实施手段、可实现种类和发展增速等角度,总结分析给出了ETV的五个发展阶段,包括物理ETV、物理数字ETV、数字物理ETV、数实融合ETV、数字ETV (D-ETV)。从“结果准、速度快、内容全、成本低、风险小”五大核心需求出发,分析了D-ETV未来发展面临的挑战。探讨了数字ETV的概念内涵,提出了D-ETV“指南针”体系架构、成熟度模型、通用流程“D”模型、技术体系和应用系统架构,并阐述了D-ETV的理想能力。基于所提D-ETV理论体系,面向重大装备和复杂系统试验测试验证需求,对数字试飞、数字风洞试验、发动机数字测试、数字战场决策验证、高档数控机床数字验证、卫星制造数字验证、数字空间站性能测试、可回收火箭数字验证、核电站安全数字测试、水下装备性能数字验证十个领域应用进行探索。期望相关工作对发展D-ETV理论与技术,更好地满足物理对象和系统在全生命周期各阶段的ETV需求提供启发和参考。