李金萍, 杨波, 王殿熙, 成保忠, 刘彦超, 高常青
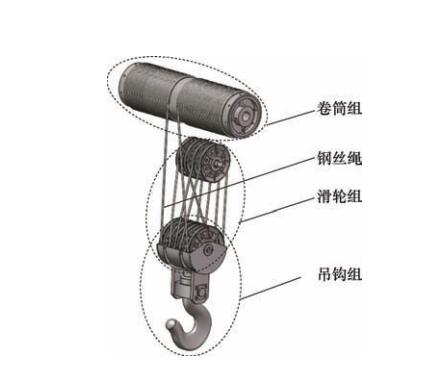
追本溯源为质量问题纠正的前提,为实现产品设计过程中质量问题的源头追踪,基于产品设计质量特性的关联关系和波动传播机制,提出了设计质量特性波动溯源分析方法。首先,提出了基于矩阵运算的多领域关联信息的统一建模方法,以产品的设计规则和装配关系为基础关联信息,建立了设计质量特性局部关联矩阵,并通过矩阵运算得到设计质量特性全局关联矩阵,进而映射为设计质量特性全局关联网络,建立了完整的、可追溯的设计质量特性关联模型;然后,提出了波动影响的量化分析方法,建立了节点的波动度量化模型和关联边的波动传播强度量化规则,基于此可对不同关联传播形态的波动传播进行风险量化评估;在上述研究的基础上,通过对质量问题-问题原因-设计质量特性多层网络进行分析,得到针对某一特定质量问题的象设计质量特性,对设计质量特性关联网络进行上游广度优先搜索,并进行设计质量特性波动诊断,得到源波动设计质量特性及其波动路径,对波动路径的波动传播风险进行量化分析即可得到最终溯源结果。最后,通过起重机卷筒变形实例验证了该方法的有效性;结果表明,相较于其他算法,该方法在准确性以及算法效率和成本的平衡方面更具有优势。