廖晓波, 庄健, 邓亚楼, 王志武, 焦阳博翰, 蔡勇, 廖璇
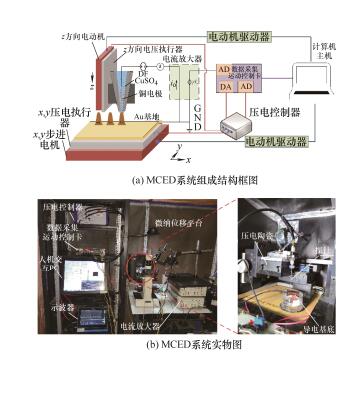
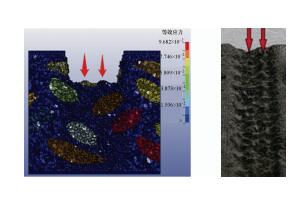
基于扫描探针的弯月形液滴限制电化学沉积方法(Meniscus confined electrochemical deposition,MCED)能够在微纳尺度进行结构制造和表面修饰,近年来受到了众多研究者的广泛关注。然而,在三维微纳结构制造(“写”)过程中,无法在线原位检测(“读”)加工结构形貌,导致其应用受到一定的限制。本研究对比分析了MCED微纳制造方法和扫描电化学池显微镜检测方法(Scanning electrochemical cell microscopy,SECCM)在系统物理配置和原理上的异同;提出SECCM交流调制模式对采用MCED方法制造的微纳结构进行在线原位成像,通过对比SECCM直流和交流模式的检测结果,发现交流模式能够有效克服直流模式对样本表面造成损伤的缺点,且抗干扰能力明显提高,成像图像的MSE降低了27.85%。对比扫描电子显微镜成像结果,验证了交流扫描模式能够较好的对样本进行在线原位成像,增加了MCED试验操作的在线可观测性和操作的准确性。因此,该方法使得在线MCED微纳操作可视、续接、定点修饰等功能成为可能,对扩宽MCED在微纳领域的应用具有重要意义。