陈祝云, 钟琪, 黄如意, 廖奕校, 李霁蒲, 李巍华
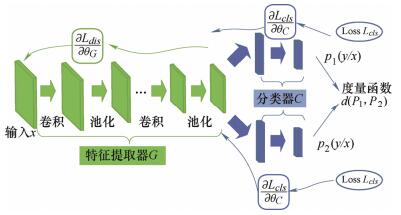
现有的基于深度迁移学习的智能诊断方法通常对源域和目标域特征对齐来减少两者分布差异,没有考虑源域类别决策边界对目标域特征匹配的影响,针对此不足,提出了一种增强迁移卷积神经网络(Enhanced transfer convolutional neural network,ETCNN)来改进机械设备在变工况下的诊断精度和泛化能力。为充分利用标签信息和提取高维特征,构建卷积神经网络和两个独立的分类器对源域数据分别训练,用于检测远离决策边界的目标域样本。为有效减少不同决策边界处样本的误匹配,进一步构建分类损失函数和分类器判别损失函数,并引入对抗训练策略,最大两个分类器的分类差异,同时最小化源域与目标域特征分布差异,实现目标域样本与源域样本自适应匹配,从而有效改进故障的分类性能。在滚动轴承数据集上对所提方法进行充分评估,并与其他三种深度迁移学习方法:域适配网络(Domain adaptive network,DAN),多层域适配网络(Multi-layer DAN,MLDAN),以及深度对抗卷积神经网络(Deep adversarial convolutional neural network,DACNN)进行充分比较,结果表明,所提方法不仅具有良好的分类能力和泛化能力,同时明显优于其他方法。