田业冰, 马振, 钱乘, AHMAD S, 马锡峰, 苑祥昱, 范增华
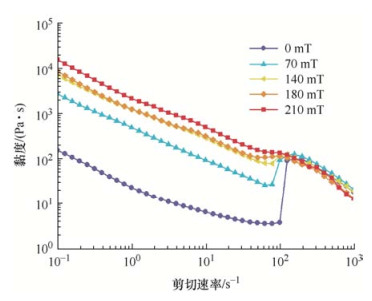
磁性剪切增稠抛光(Magnetorheological shear thickening polishing,MRSTP)是一种结合了剪切增稠和磁化增强双重刺激响应的新型多场复合抛光方法,能够满足难加工材料的高效精密抛光,但是MRSTP的微观材料去除与抛光介质流变学性能的关系尚不明确。利用磁流体力学、非牛顿流体运动学和微观接触力学,将单颗磨粒的材料去除模型与活性磨料的统计模型相结合,建立了MRSTP的材料去除预测模型。分析了抛光介质的流变特性,研究了加工参数对工件表面所受流体压力的影响规律,深入探究了磁场与应力场之间的耦合作用,揭示了MRSTP的材料去除机制。利用MRSTP方法在Ti-6Al-4V工件表面上获得了2.7 μm/h的最大材料去除率(Material removal rate,MRR),MRR理论值与实验值的相对误差为18.95%,验证了材料去除预测模型的有效性,结果表明,MRSTP方法在实现难加工材料的高效加工方面具有巨大的潜力。