姚智晓, 晁超越, 郭浩语, 张涛, 徐坤, 丁希仑, 赵曾, 庞勇, 邓剑峰, 管贻生
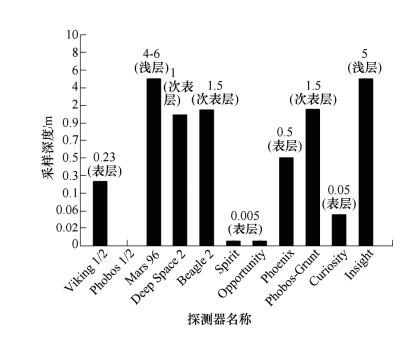
在火星探测任务中,火星壤探测的有效性和重要性突显了对火星壤采样探测技术的迫切需求。对人类至今为止的45次火星探测任务进行了集中化和图形化综合,阐述了四种火星探测方式:飞掠探测、环绕探测、着陆原位探测和着陆巡视探测。在阐述了各国/机构的火星壤采样探测技术及设备的工作机理、参数性能和发展现状,以及各国未来的火星探测计划的基础上,对目前已采用的火星壤采样探测方法进行了对比、分析及评价,并阐述了六种火星壤采样探测方法:铲挖式、钻取式、穿透式、鼹鼠式、研磨式和爪簧式。进一步对火星壤采样探测面临的地球资源约束、火星环境约束、火星地质约束和通讯时延约束四类关键技术难点和挑战做出了分析。最后,对火星壤采样探测技术的范围扩大化、需求多样化、策略长远化和实现智能化四类发展趋势做出了展望。