 PDF(3662 KB)
PDF(3662 KB)
 PDF(3662 KB)
PDF(3662 KB)
 PDF(3662 KB)
PDF(3662 KB)
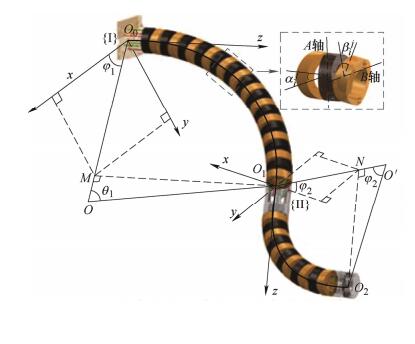
基于逆运动学的柔性机械臂末端定位控制
End Positioning Control of Flexible Manipulator Based on Inverse Kinematics
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






