胡伟飞, 廖家乐, 郭云飞, 鄢继铨, 李光, 岳海峰, 谭建荣
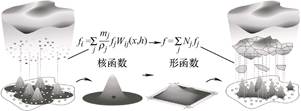
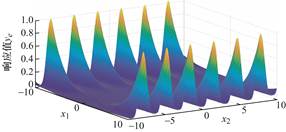
传统时变可靠性分析(Time-dependent reliability analysis, TRA)往往通过大量实验设计样本(Design of experiments, DoE)构建代理模型,从而实现时变可靠性分析计算。在这个过程中,随着性能方程的非线性程度、响应求解难度等增加,DoE的计算成本愈发高昂,使得可靠性分析耗时冗长。针对该问题,创新性地提出了一种基于物理信息神经网络(Physics-informed neural network,PINN)的时变可靠性分析方法(PINN-based TRA, PBTRA)。该方法在TRA过程中将约束系统响应的偏微分方程(Partial differential equation, PDE)融入PINN模型训练的损失函数,使用PINN模型预测系统的实际响应,并基于此构建性能方程,解决了传统时变可靠性分析依赖大量仿真计算获取实验样本的难题,有效降低了TRA计算成本。同时针对传统PINN训练过程出现的收敛缓慢和模型欠拟合等问题,根据训练过程中PINN模型在不同采样区域的响应情况,判断相关区域是否接近系统响应的极限状态,并据此划分敏感区域,动态调整训练点采样分布,进一步结合神经网络的重采样机制,提出了一种基于区域响应权重的PINN模型动态采样训练方法,并且将其应用于TRA中。相较于传统的PINN,所提方法具有更快的训练速度与更高的性能响应计算精度,进而能够提升TRA精度与效率。文章中针对两个案例测试了所提出的PBTRA方法,并与传统TRA方法进行了对比,验证了所提出方法的优越性。