穆英朋, 刘富初, 张驰, 黄捷飞, 刘鑫, 韩光超, 樊自田, 许峰
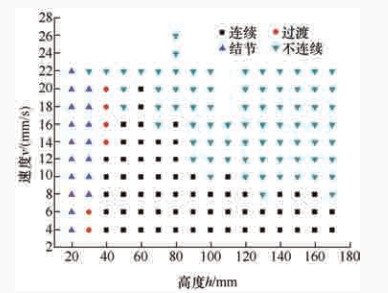
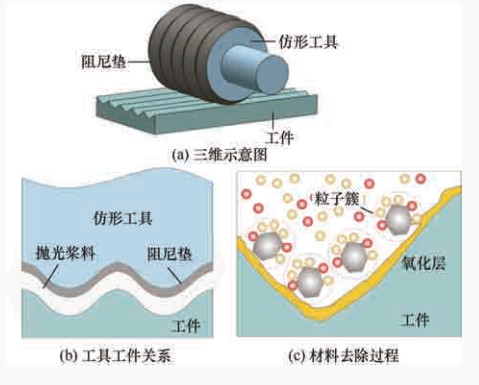
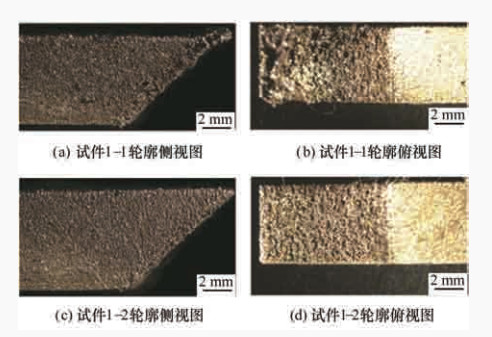
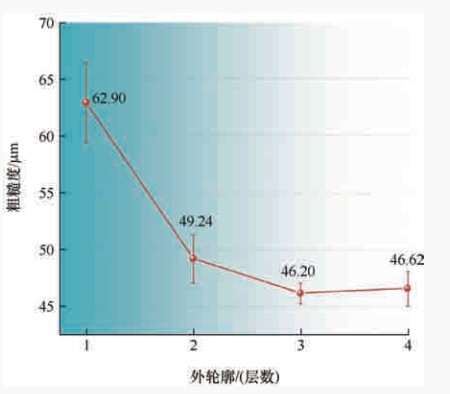
挤出式3D打印成形水溶性氧化钙陶瓷型芯可高质高效成形复杂内腔铸造构件,铸件内腔的残留型芯用水溶解即可快速清理,在复杂内腔构件精密铸造领域具有较大的应用潜力。以针头内径、层高/内径比值、打印速度和内部填充方向四个关键工艺参数进行四因素三水平正交试验,通过对不同工艺参数的3D打印成型坯体进行表面粗糙度测量与统计,采用极差分析确定各个打印参数对坯体表面质量影响的主次顺序,并得到挤出式3D打印氧化钙陶瓷型芯的最优打印参数。结果表明,内部填充方向对型芯坯体表面成形质量有显著的影响,当内部填充方向与外轮廓呈45°和90°时,内部填充浆料与外轮廓层有较多的拐点,拐点处的成形方向发生突变,进而造成挤出压力方向发生突变并作用于外轮廓层,外轮廓层变得凹凸不平,层层堆积成形的坯体表面粗糙度较大、表面质量较差。当针头内径为0.41 mm、层高/内径比值为70%、打印速度为20 mm/s、内部填充方向与外轮廓层平行时,坯体表面粗糙度最小,型芯坯体表面质量最好。通过增加外轮廓层数来可以有效地减小甚至消除填充方向对坯体表面粗糙度的影响,当外轮廓增加至两层时型芯坯体表面粗糙度降低了近22%,这对水溶性陶瓷型芯的快速精确成形具有重要意义。