梁志强, 马悦, 聂倩倩, 王西彬, 周天丰, 郭海新, 李玉, 陈建军
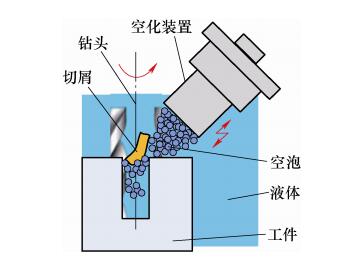
针对难加工材料微细钻削过程中排屑困难及微孔加工质量差的问题,提出微孔超声空化辅助钻削方法,分析了超声空化作用机理。通过高速摄像机观测超声空化过程,发现变幅杆端面形成了锥型空化区域,其作用范围达到10 mm以上。分别进行直径3 mm和0.5 mm的树脂工件空化钻削试验,发现超声空化效应均显著改善了切屑对刀具的黏附和缠绕现象。进一步进行了不同转速下不锈钢微孔超声空化钻削试验,利用激光扫描显微镜对微孔入口形貌、圆度、孔壁形貌和表面粗糙度进行检测。与普通钻削相比,超声空化钻削的孔径误差降低了8.5%~15.6%,入口圆度误差降低了20.0%~37.8%,孔壁粗糙度降低了12.7%~18.6%。结果表明,超声空化效应能够有效提高微孔钻削的加工质量和精度。