江献良, 陈凌宇, 郑杰基, 谭若愚, 李宝宇, 范大鹏
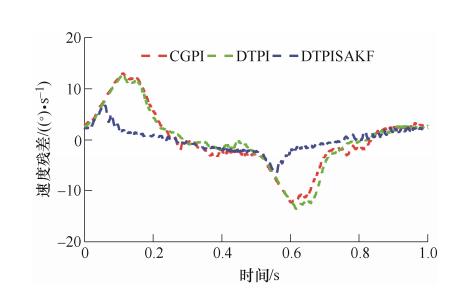
直驱部件以结构紧凑、失动量小和无间隙传动的优势在高档数控机床、航空航天精密伺服机构等重大装备中得到了广泛应用。直驱部件的伺服控制精度和动态响应特性是伺服系统的重要指标,针对负载惯量摄动和装配特性的变化造成系统伺服性能的下降甚至失稳的现象,提出一种基于数字孪生模型的复合控制方法,以物理实体数据驱动数字孪生模型参数同步,以数字孪生模型优化物理实体的伺服控制参数。首先提取了直驱系统的关键特征参数,用集总参数模型描述线性环节,用非线性参数模型描述非线性特征,建立了直驱部件的虚拟物理模型;采集物理实体状态数据,提出了基于递推增广最小二乘算法的数字孪生模型参数更新方法,实现了模型特征的自适应同步;利用同步参数优化系统控制参数,提出了指标约束下的速度控制器和扩张状态卡尔曼滤波器设计方法,形成了数字孪生驱动的复合控制策略。实验表明,提出的方法具有更好的抵抗惯量摄动能力,模型同步算法能准确快速地辨识直驱系统的惯量变化;相对传统方法,跟随20°/s&1 Hz正弦信号的速度残差均方根由5.88°/s减少为1.76°/s,优化了70%;阶跃响应过程的调整时间始终满足设计指标0.1 s,实际响应曲线与理论响应曲线的Pearson相关系数由0.957提高到了0.993。研究成果为进一步细化数字孪生模型颗粒度和推进数字孪生模型在运动控制中的应用提供参考。