李支康, 赵立波, 李杰, 赵一鹤, 徐廷中, 罗国希, 郭帅帅, 刘子晨, 蒋庄德
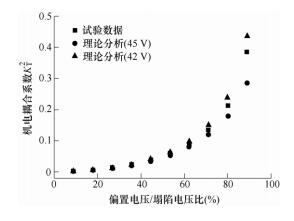
电容式微加工超声换能器(CMUTs)在便携式超声成像与治疗、家庭超声诊断系统、基于超声波的非接触式人机接口等领域具有极其可观的应用前景。实现低功耗、高机电耦合系数CMUTs的研发是解决上述应用需求的关键,而这就需要对CMUTs机电耦合系数的变化规律及其对功耗的影响具有更深入的理解。针对圆形和方形薄膜CMUTs,利用基于固定电容和自由电容比值的原理建立了圆形和方形薄膜CMUTs的机电耦合系数解析式,同时利用有限元仿真和对已有CMUTs芯片机电耦合系数的试验测试来验证理论解析式的正确性;开展了机电耦合系数的参数化研究;建立了CMUTs功耗与偏置电压之间的函数关系。结果表明圆形和方形薄膜CMUTs的机电耦合系数解析式能在低于塌陷电压96%的偏置电压范围内准确分析不同偏置电压下的机电耦合系数。在相同偏置电压下,机电耦合系数随着空腔高度增加而降低,但随着薄膜半径增大而增加;在相同偏置电压/塌陷电压比下,具有不同结构参数的CMUTs机电耦合系数相同。此外,从功耗与机电耦合系数的内在关系研究中可知通过减小塌陷电压或提高在低偏置电压下的机电耦合系数则可实现低功耗和高机电耦合系数这两种相互制约的性能参数的协调设计。