 PDF(2466 KB)
PDF(2466 KB)
 PDF(2466 KB)
PDF(2466 KB)
 PDF(2466 KB)
PDF(2466 KB)
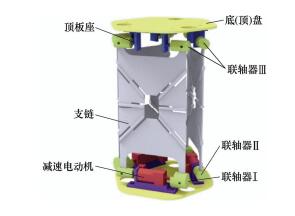
基于3-RSR并联机构的蛇形机器人本体构型设计与运动性能研究
Body Configuration Design and Kinematic Performance Research of Snake-like Robot Based on 3-RSR Parallel Mechanism
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






