PDF(700 KB)
PDF(700 KB)

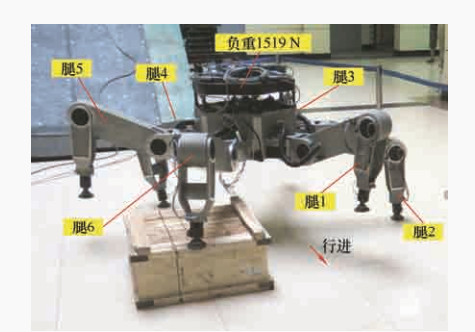
Obstacle Avoidance Control Strategy of Multi-robot Dynamic Cooperative Formation of Large-load-ratio Six-legged Robot under Nonholonomic Constraints
ZHUANG Hongchao, WANG Ning, DONG Kailun, LI Weihua, ZHOU Anliang, DONG Lei, XIA Yilu
Journal of Mechanical Engineering ›› 2024, Vol. 60 ›› Issue (1) : 284-295.
PDF(700 KB)
 PDF(700 KB)
PDF(700 KB)
Obstacle Avoidance Control Strategy of Multi-robot Dynamic Cooperative Formation of Large-load-ratio Six-legged Robot under Nonholonomic Constraints
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |