PDF(2466 KB)
PDF(2466 KB)

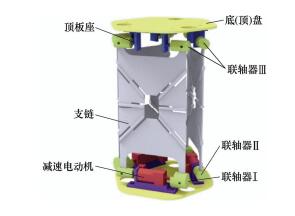
Body Configuration Design and Kinematic Performance Research of Snake-like Robot Based on 3-RSR Parallel Mechanism
WEI Wei, ZHUANG Zheming, TANG Zhao, DAI Jiansheng
Journal of Mechanical Engineering ›› 2021, Vol. 57 ›› Issue (23) : 21-33.
PDF(2466 KB)
 PDF(2466 KB)
PDF(2466 KB)
Body Configuration Design and Kinematic Performance Research of Snake-like Robot Based on 3-RSR Parallel Mechanism
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |