 PDF(772 KB)
PDF(772 KB)
 PDF(772 KB)
PDF(772 KB)
 PDF(772 KB)
PDF(772 KB)
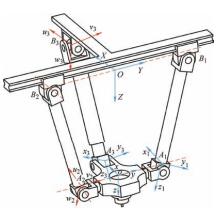
2PRU-UPR过约束并联机构弹性动力学建模与分析
Elastodynamic Modeling and Analysis of a 2PRU-UPR Over-constrained Parallel Manipulator
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






