 PDF(532 KB)
PDF(532 KB)
 PDF(532 KB)
PDF(532 KB)
 PDF(532 KB)
PDF(532 KB)
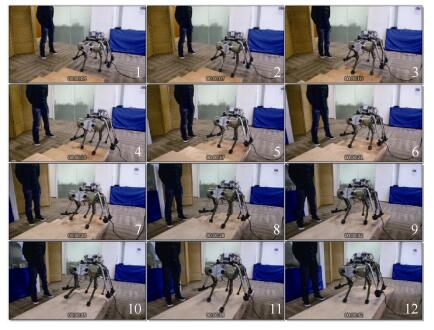
面向未知复杂地形的四足机器人运动规划方法
Motion Planning Method for Quadruped Robots Walking on Unknown Rough Terrain
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






