 PDF(6483 KB)
PDF(6483 KB)
 PDF(6483 KB)
PDF(6483 KB)
 PDF(6483 KB)
PDF(6483 KB)
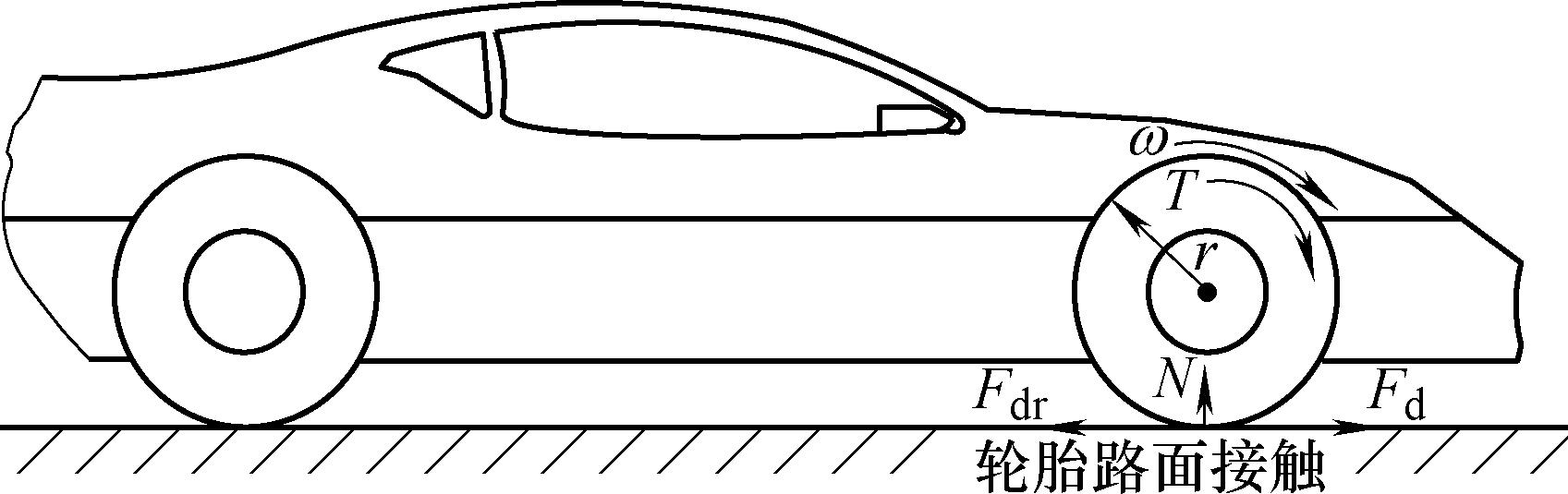
复杂动态路面的电动轮附着状态识别与稳定控制策略研究
Study on Identification of Adhesion State and Stability Control Strategy of Electric Drive Wheel on Complex Dynamic Road
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |






